The Mars rover Sojourner and its newer replacements Spirit and Opportunity show that preliminary research on the red planet can be conducted very efficiently by robotic vehicles. These missions are relatively inexpensive compared to other experiments but have garnered many advances.
Editors Note: This article was originally published on April 17, 2010, and edited on 5/21/2013 to modify the article title, correct a couple typographical errors, and provide a link to the NASA Mars Science Laboratory where you can follow Rover Curiosity’s progress.
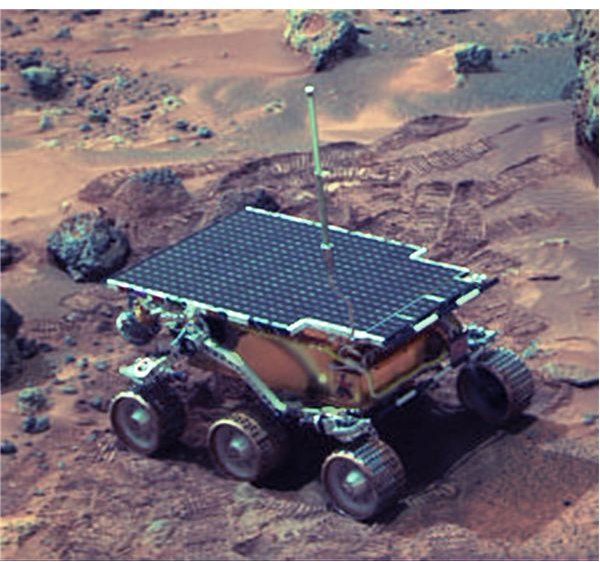
The Sojourner
Launched on December 4, 1996, the Mars Pathfinder mission was a key part to the overall Mars exploration program. After a seven month trip to the red planet, the lander arrived on the surface on July 4, 1997 and opened its doors to deliver the first rover to the fourth planet from the Sun: Sojourner.
This rover would successfully operate for months, finally ending on September 27 with a loss of contact with the lander. It is expected that the rover lost power while trying to reconnect with NASA. The entire project cost roughly $280 million according to NASA estimates.
Directed by the Jet Propulsion Laboratory (JPL), Sojourner was designed to perform a number of experiments on the surface of the planet. Most notably, the rover was capable of conducting advanced experiments on a number of rocks around the landing site. Facts about the Mars rover show that while the system was rudimentary by today’s standards, Sojourner was a remarkable step forward in scientific research.
According to Jacob Matijevic, the Microrover Flight Experiment Manager at JPL, the Sojourner was fitted with a rad-hard Intel 80C85 processor integrated with the memory and I/O electronics. This required less than 4W of power, making the 16W of solar energy produced each Martian sol efficient enough to power the robot. It had four types of memory, executing less than 100 Kips: rad-hard ROM, rad-hard RAM, EEPROM and bulk RAM.
The length of the vehicle was a little over two feet long, 18 inches wide and roughly a foot tall. Its weight was about 23 pounds. With its six wheels, it was capable of traveling at speeds of two feet per minute for a maximum range of about a third of a mile from the lander.
Sojourner was also fitted with two black and white cameras, a color camera and an Alpha Proton X-ray Spectrometer, used to analyze rocks and soil using a process of irradiating the samples with helium nuclei.
Above right: Sojourner. (Supplied by NASA; Public Domain; https://upload.wikimedia.org/wikipedia/commons/3/3a/Sojourner _on_Mars_PIA01122.jpg)
Mars Exploration Rovers: Spirit and Opportunity
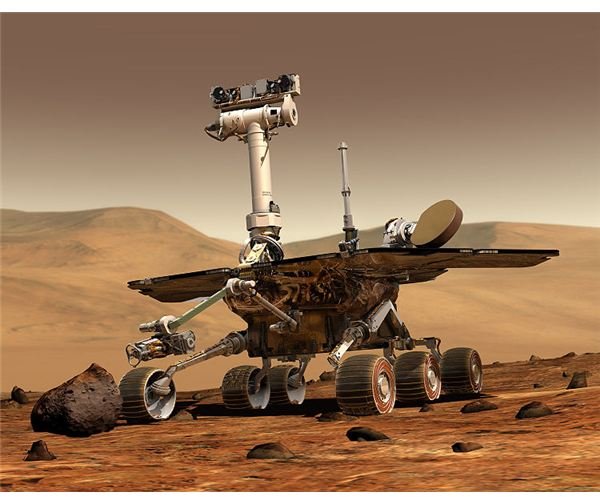
Beginning in 2003, the Mars Exploration Rover Mission is considered by NASA to be the most successful mission to the red planet yet. Two rovers, Spirit and Opportunity, landed on Mars with the goal of exploring the geology and surface of the planet, while at the same time making assessments of possible water activity in the past.
The most treacherous part of the mission to date was a memory upgrade that became necessary for both vehicles in 2004. Also, a series of dust storms in 2007 threatened to cover the solar panels, reducing their power generation capability. In 2009, Spirit became stuck in soft soil and was immobilized. It now operates as a stationary science laboratory. However, Opportunity was still functioning as designed as of 2010.
The original mission was planned to last 90 Martian days at a cost of $820 million. However, the facts about the Mars rover program shows that the vehicles were designed much more efficiently than originally planned. Since the expiration of the original mission plan, the operation has been expanded five times at a cost of $124 million.
Each rover is designed as a six-wheeled vehicle powered by solar energy. They stand nearly five feet tall, 7.5 feet long and a little over five feet wide. With a weight of 400 pounds, Spirit and Opportunity are very stable and can face off against the strong winds of the Martian atmosphere. The suspension system allows the rovers to maneuver through a variety of obstacles for a top speed of roughly 10 feet per minute.
On the technical front, the rover design for this project show that the advanced hardware and scientific instruments have benefited the overall mission parameters. Its 20 MHz RAD6000 CPU with 128 MB of DRAM controls both a low-gain and high-gain antenna for communication wit

h the Mars Odyssey satellite or directly with Earth. There are a total of nine cameras on each rover, along with a exploratory arm equipped with a pair of spectrometers, magnets, microscopic imaging device and a rock abrasion tool.
While each generation of Mars rover shows vast improvements over the previous, the future holds even more great designs. NASA plans to launch a fourth rover in the form of Curiosity, the Mars Science Laboratory, a much larger robotic vehicle. In addition, the European Space Agency intends on launching a rover of its own called ExoMars.
Editors Note: Since the original publication of this article on April, 2010, the Curiosity is currently exploring the red planet. You can follow its progress here: https://www.nasa.gov/mission_pages/msl/index.html
Above left: NASA Mars Rover. (Supplied by NASA; Public Domain; https://upload.wikimedia.org/wikipedia/commons/d/d8/NASA _Mars_Rover.jpg)
Above right: Different Wheels of Rovers. From left to right: Sojourner, Spirit, Curiosity. (Supplied by NASA; Public Domain; https://upload.wikimedia.org/wikipedia/en/1/10/H _rover-comp_wheels_02.jpg)
References
“Mars Exploration Rovers” Jet Propulsion Laboratory: https://www.nasa.gov/mission_pages/msl/index.html
This post is part of the series: The Mars Exploration Rover and Past Missions
Mars exploration rover and Viking mission are highly important to our history of the red planet. The overall goal in Mars exploration rover technology and the new Mars Science Laboratory is to analyze the possibility of a manned mission to Mars and possibly find water.